Incremental Rotary Encoder How to Distinguish Signals from
If you’ve ever worked with motors or automation systems, you’ve probably heard about Incremental rotary encoder. These devices are crucial for determining position, speed, and direction of rotating shafts. But not all rotary encoders are created equal. The two most common types are incremental and absolute encoders — and understanding how their signals differ is key for choosing the right component for your system.
In this blog, we’ll take a detailed look at how to distinguish the signals from incremental rotary encoders versus absolute ones. Along the way, you’ll find practical explanations, helpful tables, and useful hints to help you select the best encoder for your B2B needs.
What Is an Incremental Rotary Encoder?
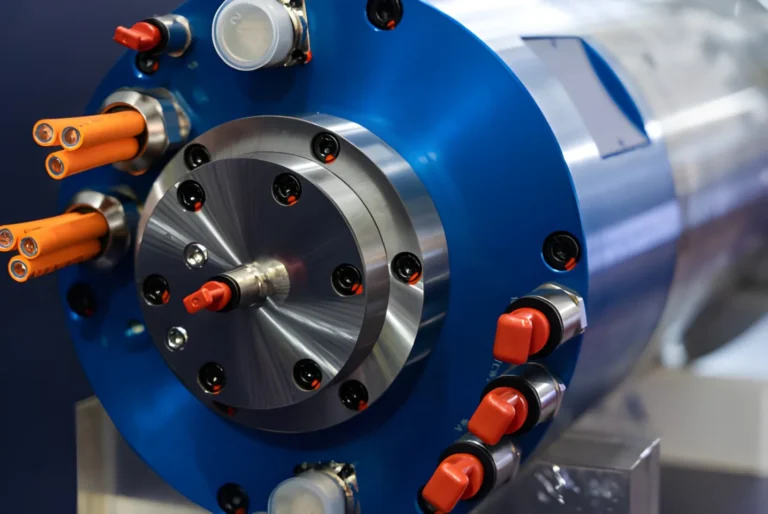
What Is an Incremental Rotary Encoder? An incremental rotary encoder converts rotational motion of a shaft into an electrical output in the form of pulses. These pulses represent small increments of movement and must be counted to determine position.

Key Features:
- Signal Channels: Typically two channels, labeled A and B, generate square wave pulses.
- Quadrature Output: Channels A and B are offset by 90°, allowing the encoder to detect rotation direction based on which signal leads.
- Index Pulse (Channel Z): A single pulse per revolution to identify a reference or ‘home’ position.
| Feature | Description |
|---|---|
| Output Signals | Two square waves (A & B), 90° phase-shifted |
| Direction Detection | Phase lead/lag between A and B channels |
| Position Reference | Optional index pulse (Channel Z) |
| Memory of Position | No, requires resetting at power-up or reference point |
Incremental Rotary Encoder How It Works
Imagine you’re counting every tiny step as you walk across a room. The encoder outputs pulses for every incremental movement of the shaft. But since these pulses only show movement change, the system needs a known starting point to calculate exact position.
Want to know more? Feel free to contact us for detailed specs or custom incremental encoders designed to fit your project.
What Is an Absolute Rotary Encoder?
An absolute rotary encoder provides a unique digital code for every angle of the shaft — a direct read of position without needing to count pulses.
Key Features:
- Unique Codes Per Position: Uses digital encoding schemes (binary, Gray code).
- Memory of Position: Maintains position info even when powered off.
- Signal Output: Can be parallel, serial, or fieldbus communication.
| Feature | Description |
|---|---|
| Output Signals | Digital code representing absolute shaft position |
| Direction Detection | Direct from code changes |
| Position Reference | No need for homing |
| Memory of Position | Yes, position retained after power loss |
These encoders are like having a digital map telling you exactly where you are on every turn, no matter what happened before.
Core Differences Between Absolute and Incremental Rotary Encoder Signals
| Aspect | Incremental Encoder | Absolute Encoder |
|---|---|---|
| Signal Type | Pulses (A, B channels with phase offset) | Digital positional code |
| Position Memory | Requires reference/reset after power cycle | Retains exact position at all times |
| Direction Detection | Phase difference between A and B channels | Direct from changing digital output |
| Complexity & Cost | Simpler, generally less expensive | More complex, potentially higher cost |
| Application Examples | Speed monitoring, relative positioning | Robotics, multi-turn applications needing absolute position |
Understanding this table can help you quickly decide which type suits your application.

Need reliable incremental rotary encoder for your business? Send an inquiry today and get the perfect fit for your application!
Incremental Rotary Encoder Signals Explained
Incremental encoders generate pulses at a specific rate known as pulses per revolution (PPR). The higher the PPR, the finer the measurement resolution. For example, a 1000 PPR encoder produces 1000 pulses during one full shaft rotation.
How the Signals Work:
- Channel A & B: Two square waves shifted by 90 electrical degrees (quadrature signals). The phase difference tells you rotation direction.
- Index (Z) Channel: Outputs one pulse every full rotation, useful for synchronization or homing.
This 90° offset is vital — it’s like having two dancers stepping slightly out of sync so you can tell who’s leading.
Here’s a simple representation:
| Time | Channel A | Channel B | Rotation Direction |
|---|---|---|---|
| t0 | HIGH | LOW | Clockwise |
| t1 | HIGH | HIGH | Clockwise |
| t2 | LOW | HIGH | Clockwise |
If the order reverses, the direction is counterclockwise.
Practical Tip: Your control system must count these pulses to track position. After power loss, you’ll need to re-establish a reference point using the Z channel or an external sensor.
Interested in incrementals with custom resolutions or rugged designs? Contact our team today!
Absolute Rotary Encoder Signals Explained
Absolute encoders typically output a multi-bit digital word representing the exact angular position. When the encoder shaft rotates, this output changes to reflect the shaft’s current orientation.
Types of Encoding:
- Binary Encoding: Straight binary numbers assigned to each position.
- Gray Code: A binary system where only one bit changes between adjacent positions, reducing errors.
Benefits:
- No need to reset or find home on startup.
- Ideal for systems requiring precise position data even after shutdown.
| Property | Absolute Encoder Signal Example |
|---|---|
| Multi-bit Output | 8 bits represent 256 distinct positions |
| Position Recovery | Instant after power cycle |
| Communication | Parallel, SSI, or industrial fieldbus |
Absolute encoders are perfect when you cannot afford position loss — like in robotic arms or large manufacturing equipment.
Need an absolute encoder tailored for harsh environments or specific interfaces? Reach out for custom solutions.
Choosing Between Incremental and Absolute Encoders
Your application’s needs should guide your choice:
- Use Incremental Encoders when:
- You need simple speed or relative position data.
- Budget constraints prioritize lower cost.
- System can perform homing after power loss.
- Use Absolute Encoders when:
- Position must be known immediately on power-up.
- Multi-turn or precise absolute positioning is important.
- System demands high reliability and precision.
| Criteria | Incremental Encoder | Absolute Encoder |
|---|---|---|
| Cost | Generally lower | Generally higher |
| Signal Processing | Requires counting & logic | Direct position reading |
| Power Loss Handling | Needs re-homing | No re-homing needed |
| Application Example | Conveyor speed control | Robotics, CNC machines |
Choosing between an incremental and an absolute rotary encoder comes down to your specific application needs. Incremental encoder are ideal for applications measuring speed or relative position, offering simplicity and cost-effectiveness. Absolute encoders shine where precise, non-volatile position data is critical — especially after power interruptions.
Understanding the signals each produces equips you to correctly interface your systems, optimize performance, and avoid costly mistakes.
If you’re looking to source high-quality rotary encoders or need advice on choosing the right type for your machinery, don’t hesitate to reach out. Our team at Sensyorcoder is ready to help you find the perfect encoder solution tailored to your business needs.
FAQ
Why do incremental encoders have two channels (A and B)?
The two channels generate quadrature signals offset by 90°, enabling the detection of rotation direction by observing which channel leads the other.
How do absolute encoders retain position after power loss?
Absolute encoders output a unique digital code representing the shaft angle, so they always know the position without needing a reference reset.
What does pulses per revolution (PPR) mean in incremental encoders?
PPR defines how many pulses the encoder produces per full rotation. Higher PPR means higher resolution and more precise measurement.
Can incremental encoders be used for multi-turn positioning?
Typical incremental encoders only measure position within one turn and need external counters for multi-turn tracking.
How do you convert incremental encoder signals to absolute position?
This requires external electronics or software that counts pulses from a known reference point and keeps track of position changes.